# 排序和搜索算法
# 排序算法
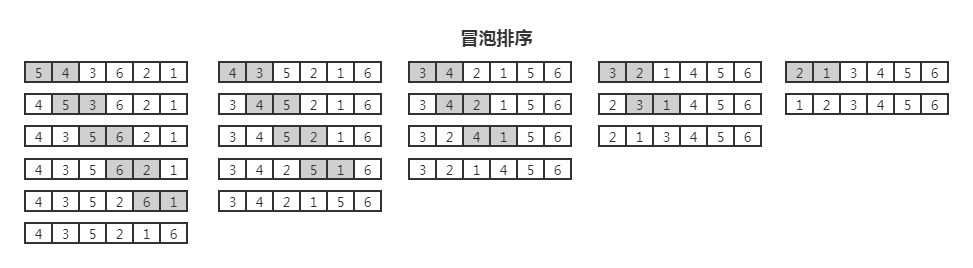
# 冒泡排序
冒泡排序代码细节:bubble-sort.ts (opens new window)
冒泡排序(bubble-sort):每轮都比较数组里相邻两项,如果左项大于右项就交换彼此,目的是每轮都让最大的移到数组末尾,所有轮结束后数组就是升序排序的了(降序是将最小移到末尾)。
值得注意的是,在每轮都将最大的冒泡到末尾后,在下一轮时是无需再处理末尾项了,所以在内部循环时要记得减去 i 。还有就是如果某轮里,没有交换过左右项,那么可以提前退出算法,因为上一轮排完凑巧就排完了。
平均、最差场景的时间复杂度是 O(n^2),最好情况是 O(n);空间复杂度是 O(1),相邻项交换是常量级的临时空间。
# 选择排序
选择排序代码细节:selection-sort.ts (opens new window)
选择排序(selection-sort):每轮从数组里选一个比目标项小并且是最小的项(剩余项里最小的),记住它的下标,在每轮结束时交换目标项与该项的值,所有轮结束后数组就是升序的了。
值得注意的是,在每轮都找出比目标项小的项,这个项还要在剩余项里最小,所以每轮的 j 都是从 i+1 开始的,还要记住最小项的索引。
选择排序与冒泡排序的相同点:都是比较当前项和目标项的大小,并且每轮都让最大或最小项移到数组的一边。其实就是从剩余项中找出最大或最小项,然后排到数组的一端。
选择排序与冒泡排序的不同点:冒泡排序是一直交换当前项和目标项以达到目的;选择排序是记住最大或最小项的位置,到一轮快结束时才交换以达到目的。
两者核心思想相似,但处理手段不同,这也决定它们的最差、平均时间复杂度都是 O(n^2),空间复杂度都是 O(1)。而选择排序的最好时间复杂度还是 O(n^2)不能提前退出,因为它减少了交换次数。

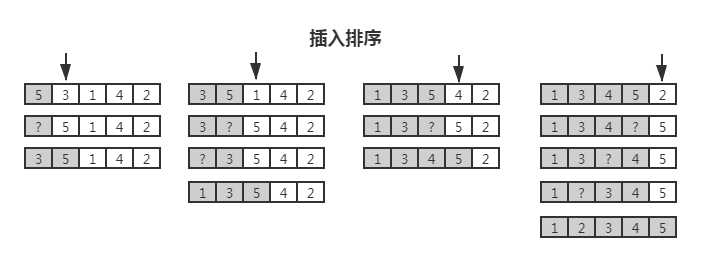
# 插入排序
插入排序代码细节:insertion-sort.ts (opens new window)
与冒泡和选择两种排序不同的是,插入排序(insertion-sort) 不会从剩余项中找最大或最小项放入数组一端,它是每轮从剩余项中随意取一项(默认取第一个),将它与排好序的项进行比较,然后放入适当的位置;一直到剩余项都处理完。
可以说插入排序是反其道而行,随意从剩余项中取一项然后按顺序插入已排序列表里,例如插扑克牌。最差、平均时间复杂度是 O(n^2),最好情况是 O(n);空间复杂度是 O(1)。
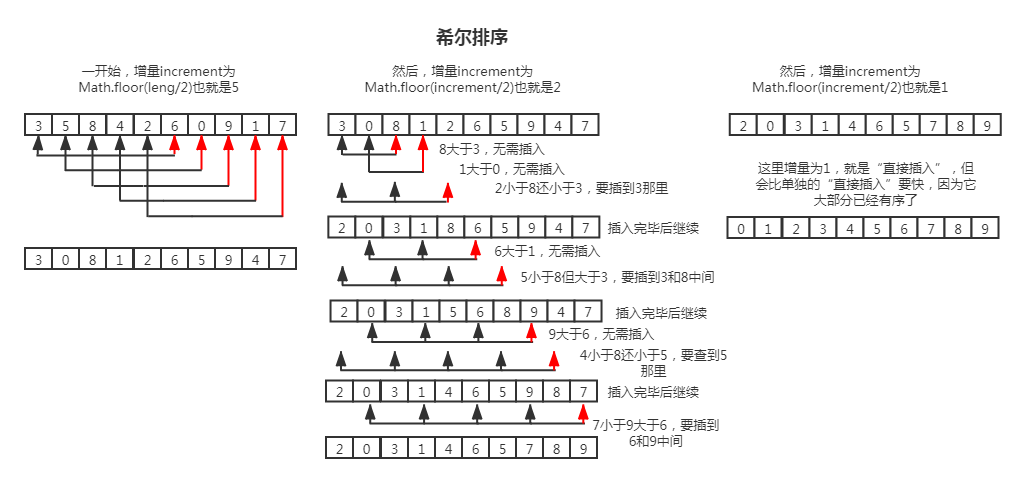
# 希尔排序
希尔排序代码细节:shell-sort.ts (opens new window)
希尔排序(shell-sort):先取一个增量 k(可以是数组长度的一半,也可以是更好的增量取法),对数组里所有互相隔 k 距离的元素进行插入排序;下一轮将增量折半(或者更好增量取法),重复之前的步骤,直到增量为 1(最后一个增量必须为 1)并执行完插入排序后结束整个算法。
折半式增量是最先提出来的,其最好情况下的时间复杂度为 O(n),平均时间复杂度为 O(n^(1.3)),最坏时间复杂度是 O(n^2)。
Hibbard 在 1963 年提出的[1, 3, 7, ..., 2^n-1]这样的增量序列,特点是没有公因子。其最坏时间复杂度是 O(n^(3/2)),其平均时间复杂度被模拟出来是 O(n^(5/4))。
Sedgewick 在 1982 年提出[1, 8, 23, 77, 281, 1073, 4193, 16577...],除了第一项的通项公式:4 * 2^(2 * i) + 3 * 2^i + 1(其中 i 为 0,1,2,3,4...);又在 1986 年提出[1, 5, 19, 41, 109, ...](偶数项的通项公式:9 * 2^i - 9 * 2^(i/2) + 1,奇数项的通项公式:8 * 2^i - 6 * 2^((i+1)/2) + 1)。Sedgewick 提出的几种,最坏情形时间复杂度是 O(n^(4/3)),平均时间复杂度猜测在 O(n^(7/6)),要比 Hibbard 好很多
希尔排序是基于插入排序的,它没有快速排序快(如果有合适的增量序列,在小规模数组中将会比堆排序、快速排序快),但在中等规模表现良好,涉及到大规模数据将不如快速排序。有一个在大规模数据中表现优异的增量序列是(斐波那契数列除去 0 和 1 将剩余的数以黄金分割比的两倍的幂进行运算得到的数列):(1, 9, 34, 182, 836, 4025, 19001, 90358, 428481, 2034035, 9651787, 45806244, 217378076, 1031612713,…)
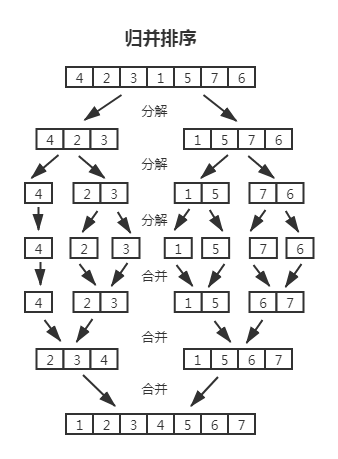
# 归并排序
归并排序代码细节:merge-sort.ts (opens new window)
归并排序(merge-sort) 跟冒泡、选择、插入三种排序方式区别很大,它运用了分而治之的思想。一直将数组分割成长度近似的两段,直到长度为 1 不可分割;再将其一一合并,归并的过程中会将左右两边的元素进行依次排序(从左右分别拿一项进行比较,排好序放入新数组,直到左右其中一个里元素被取完,而剩余的也会被连接到新数组),最后合并得到的新数组就是排好序的数组。
最差、平均、最好时间复杂度都是 O(nlogn);空间复杂度是 O(n),因为在每次合并的过程中都使用了一个临时数组存储。
# 快速排序
快速排序代码细节:quick-sort.ts (opens new window)
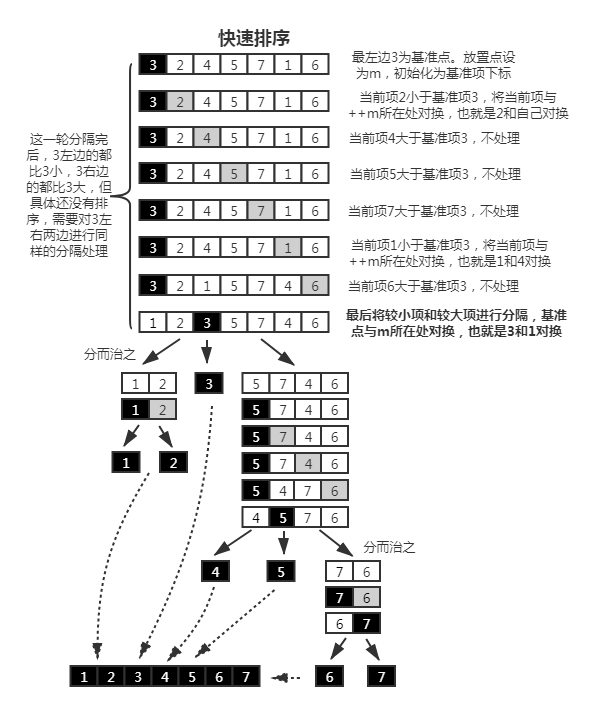
快速排序(quick-sort):将数组分隔成两段,分隔时会对数组进行简单排序,将较小项移到分隔点左边,对应右边是较大项。但由于左右两边里面也没顺序,那将左右两边也进行分隔处理,直到不能再分隔,这样使得每个小段都有了顺序,进而整段也是有了顺序。
这样看来快速排序也是分而治之的一种应用,跟归并排序很像,两者区别就是:一个是分开时简单分类(大致顺序)后面直接合并, 另一个是分开时不处理后面合并时再排序。
快速排序的空间复杂度都是 O(1),没有每轮借助临时数组;快速排序的最好、平均时间复杂度都是 O(nlogn);最差时间复杂度是 O(n^2),因为当数组原本是降序的,要求排成升序的,并且基准点取的是最左边时,算出的下一轮的基准点还是最左边(一般返回给下一轮的应该是中间点),这就导致它没有了左右两边数组的递归了,而是就是它本身去排序了,退化成 n^2 这样的排序了。
# 计数排序
计数排序代码细节:counting-sort.ts (opens new window)
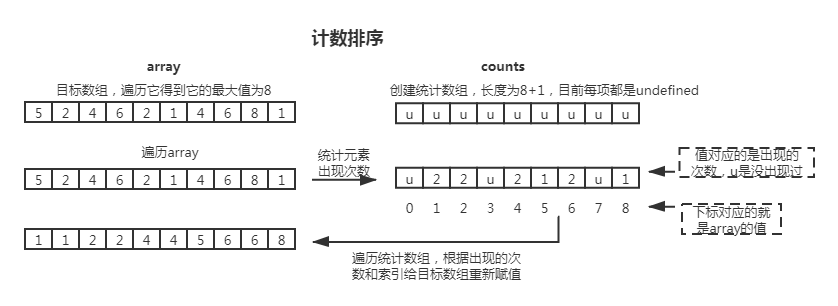
计数排序(counting-sort):目标数组有 n 个元素,其中最大值为 k;先构造一个长度为 k+1 的统计数组,这个统计数组的索引对应着目标数组里的元素值;然后去统计目标数组里每个元素出现的次数,存储到统计数组对应索引上(次数分布到统计数组里);最后遍历统计数组,将其索引当作新项加到新数组里,而“次数”是有几次就给新数组加同样的项几次。
值得注意的是,此方法很局限,它适合对小范围的非负整数的数组进行排序;当 n 不大而 k 很大时,是不适合使用计数排序的,因为会导致统计数组的长度过长。
计数排序的空间复杂度是 O(n+k),因为它额外使用了一个 k+1 长的统计数组。平均的时间复杂度是 O(n+k),最后由统计数组到新数组时,先遍历了 k 次,再此基础上还总共遍历了 n 次插入重复值;当 k=n 时也就是最好时间复杂度是 O(n);当 k 远大于 n,而 n 很小,主要依赖于 k,所以最差时间复杂度是 O(k)。
# 桶排序
桶排序代码细节:bucket-sort.ts (opens new window)
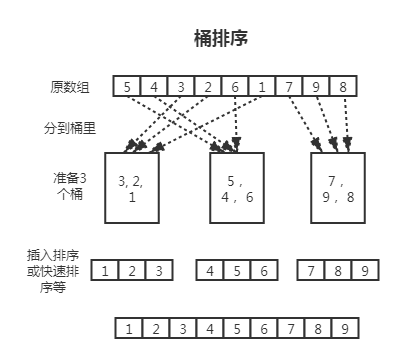
桶排序(bucket-sort):跟计数排序类似,只是我们准备的不是统计数组,而是桶这样的二维数组;遍历目标数组,将每个元素按照大小分配到对应的桶里(将元素分布到桶里);所有元素遍历完后,桶之间是有顺序的但桶内部是没有顺序的,这里我们就需要对桶内部进行排序,一般选择快速排序或插入排序;每个桶都排完序后,将桶合并就会得到排好序的数组。
尽量将 n 个数据平均分配到 k 个桶中,这样每个桶就有 n/k 个数据量;尽量的增大桶的数量,极限情况下每个桶只能得到一个数据,这样就完全避开了桶内数据的排序操作。当然,做到这一点很不容易,数据量巨大的情况下,会使得桶的数量巨大,空间浪费严重。这就是一个时间代价和空间代价的权衡问题了。
对于 n 个待排数据,k 个桶,平均每个桶 n/k 个数据这样情景的平均时间复杂度为:O(n)+O(k*(n/k)*log(n/k))=O(n+nlog(n/k))。当 k=n 时,是最好效率的排序,也就是最好时间复杂度是 O(n)。空间复杂度是 O(n+k)
# 基数排序
基数排序代码细节:radix-sort.ts (opens new window)
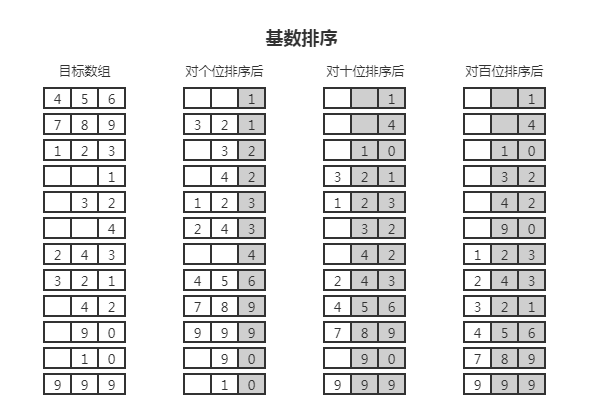
基数排序(radix-sort):一种特殊的桶排序,主要是对整数或字符串的每一位进行排序,可以从低位开始也可以从高位开始;桶的数量(基数)就是一个数的进制数。例如数组是十进制整数的,那么桶数(基数)就是 10,分别是从 0 到 9 这样的 10 个桶;然后依次从个位、十位、百位、千位这样从低到高进行每一轮排序,结束后每位上都是相对有序的,整体上也是有序的。
如果数组里的元素是位数比较多的整数,那么就适合从高位开始排,位数比较低的就适合从低位开始排;时间空间复杂度都是 O(n*k),k 是元素的位数。
# 堆排序
在前面章节已经说过了:堆排序
# 搜索算法
# 顺序搜索(线性搜索)
顺序搜索(线性搜索)代码细节:sequential-search.ts (opens new window)
顺序搜索(线性搜索):遍历该线性数据结构,将每个元素和要找的元素一一进行对比,如果相同就立即返回结果,不同就继续查找。
# 二分搜索
二分搜索代码细节:binary-search.ts (opens new window)
二分搜索:
1.在待选区间里选择中间值,如果中间值就是待搜索值,就直接返回;
2.如果待搜索值比中间值要小,就将目前区间的左区间(较小区间)作为待选区间,然后重复步骤 1;
3.如果待搜索值比中间值要大,就将目前区间的右区间(较大区间)作为待选区间,然后重复步骤 1。
# 内插搜索
内插搜索代码细节:interpolation-search.ts (opens new window)
内插搜索:改良版的二分搜索,要在步骤 1 中使用一个特殊公式去选定一个值。
1.在待选区间里利用公式选定一个值,如果选定值就是待搜索值,就直接返回;
2.如果待搜索值比选定值要小,就将目前区间的左区间(较小区间)作为待选区间,然后重复之前步骤;
3.如果待搜索值比选定值要大,就将目前区间的右区间(较大区间)作为待选区间,然后重复之前步骤。
公式是这样的,先算出搜索值在“max 和 min 的差值”的“占比”,再将“max 的索引和 min 的索引的差值”乘以这个“占比”,就可以大致推断出搜索值的索引。
# 随机算法
# Fisher-Yates 随机
Fisher-Yates 随机代码细节:fisher–yates.ts (opens new window)
Fisher-Yates 随机:从最后一项开始并将当前位置和一个随机位置进行交换,这个随机位置要比当前位置小。
← 10.图 12.算法设计与技巧 →